Independent Projects
Mechatronics & Design
Independent engineering ventures focusing on robotics, advanced kinematics, and full-stack integration.

Key Contributions
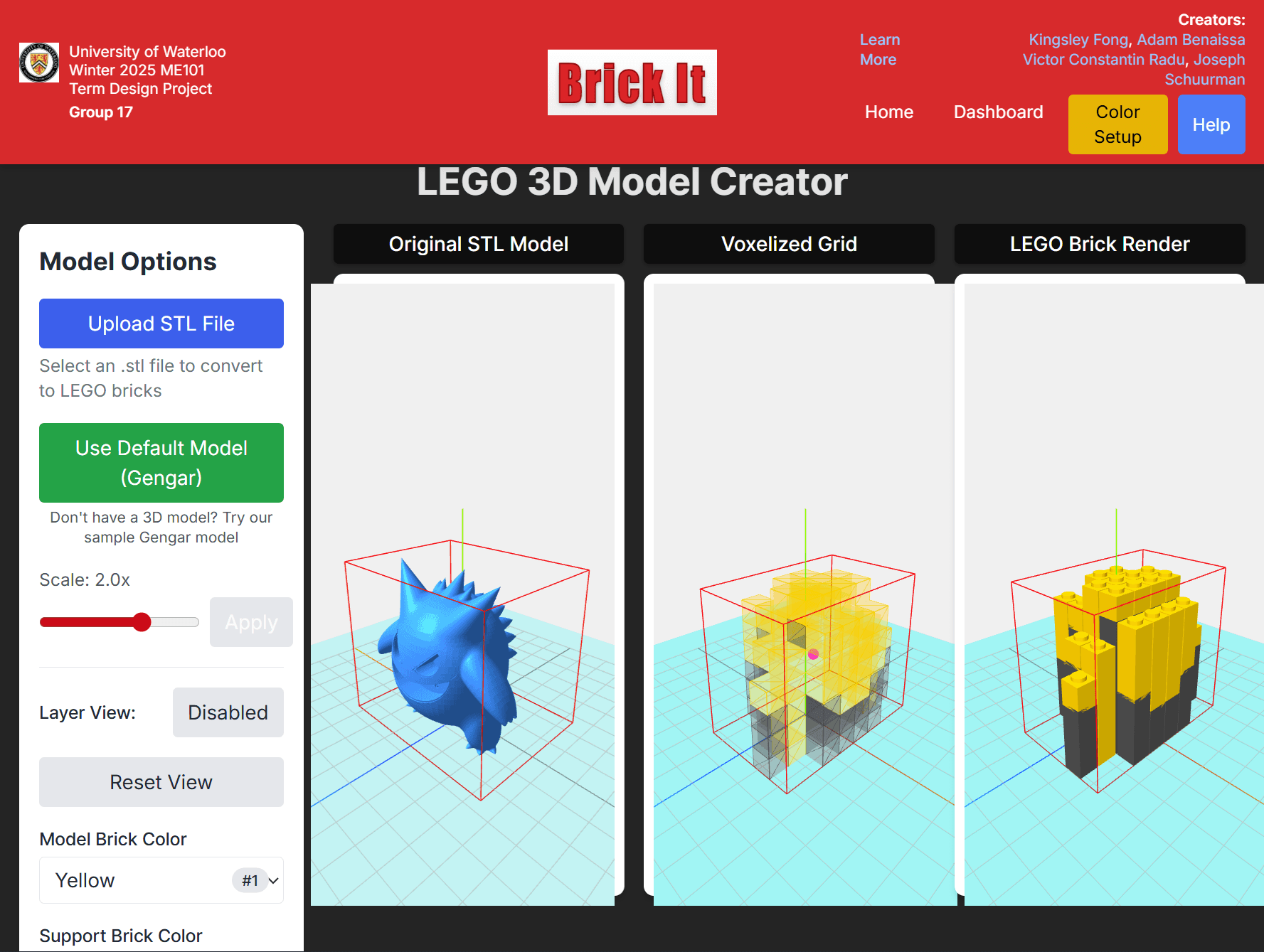
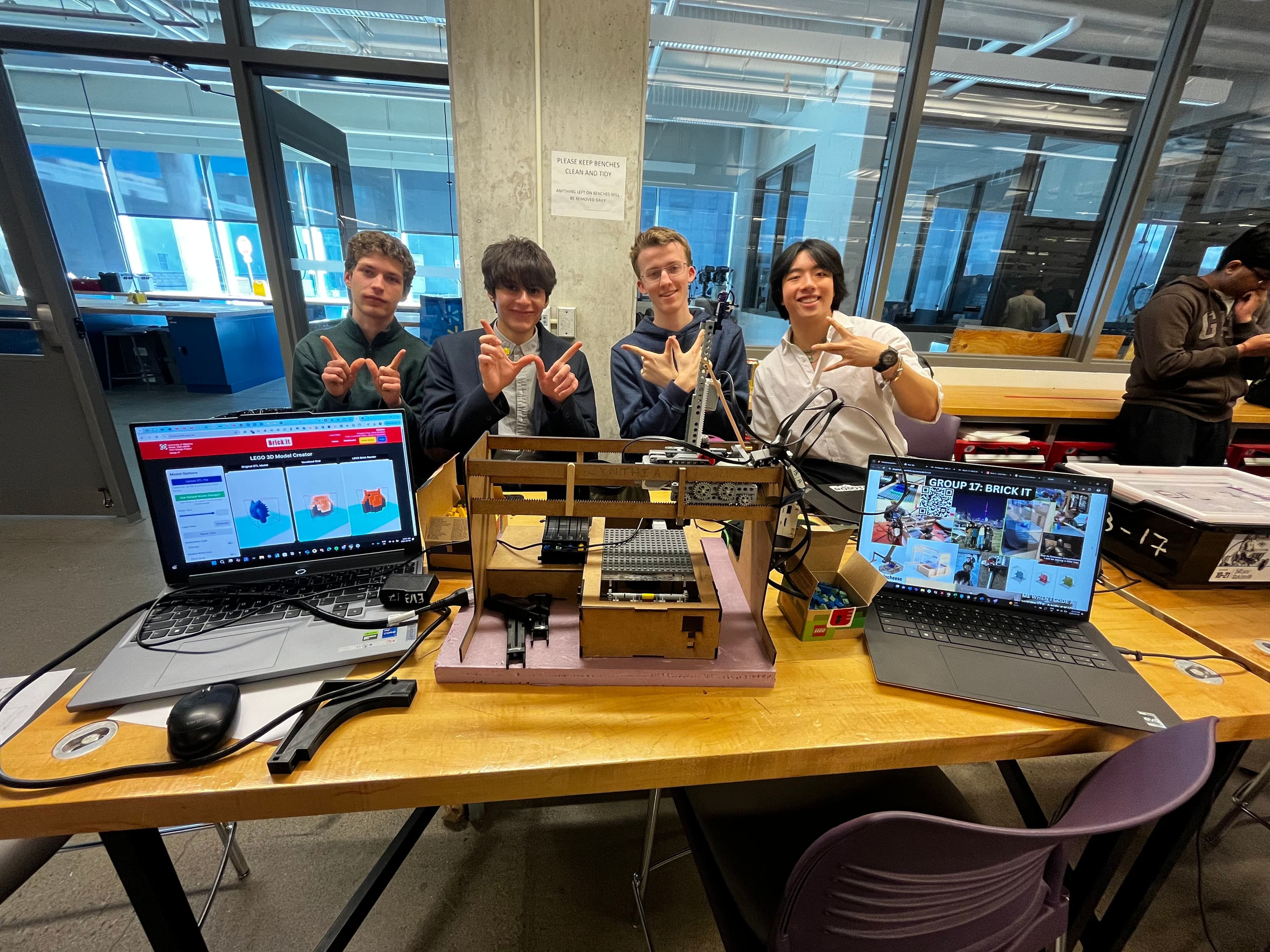
Brick It! LEGO 3D Printer
The Challenge
Led development of a gantry-based robotic cell that converts user media into automated LEGO builds. Built a prototype assembly system with part feeding, motion control, sensing, calibration, and toolpath generation.
The Approach
CAD in SolidWorks, using FEA and test builds to reduce placement error. Programmed ROBOTC homing, placement, recovery, and sensor checks, plus a fullstack React/Three.js web slicer.
The Impact
Achieved 9.5 s/brick and 92% placement accuracy after calibration and repeated test builds. Reduced dispenser part count by ~30% and magazine changeover time by ~25%. Reduced end-effector deflection by ~15%, improving placement stability.
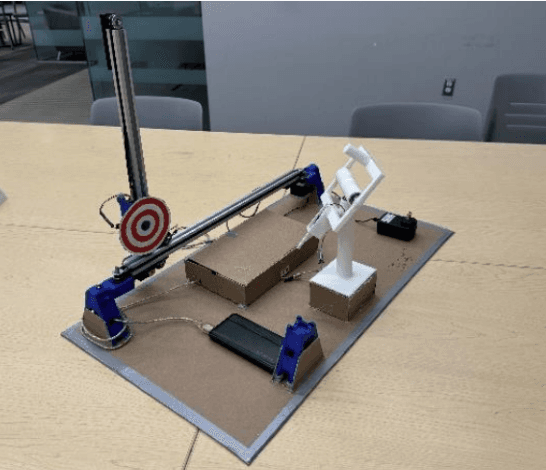
Trace It! Interactive Targeting
The Challenge
Design an interactive targeting platform capable of highly accurate and stable tracking under variable environmental conditions.
The Approach
Engineered a belt-driven motion platform utilizing closed-loop stepper control and IR sensing. Applied DFM and tolerance analysis, utilizing CNC machining and additive manufacturing for structural components.
The Impact
Achieved 95% detection accuracy and stable tracking at 8 cm/s under variable lighting. Improved overall system reliability and simplified the assembly process for repeatable builds.
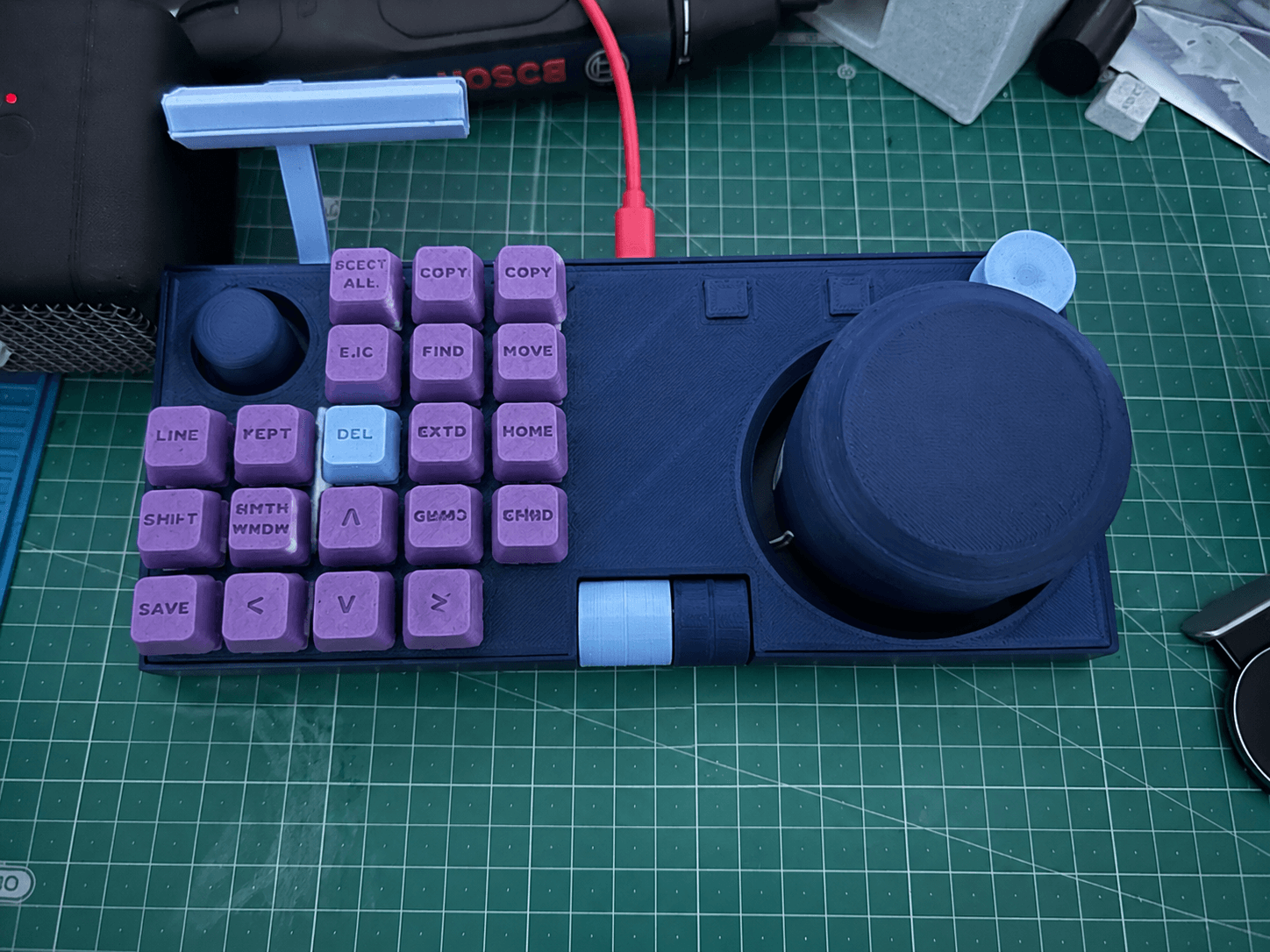
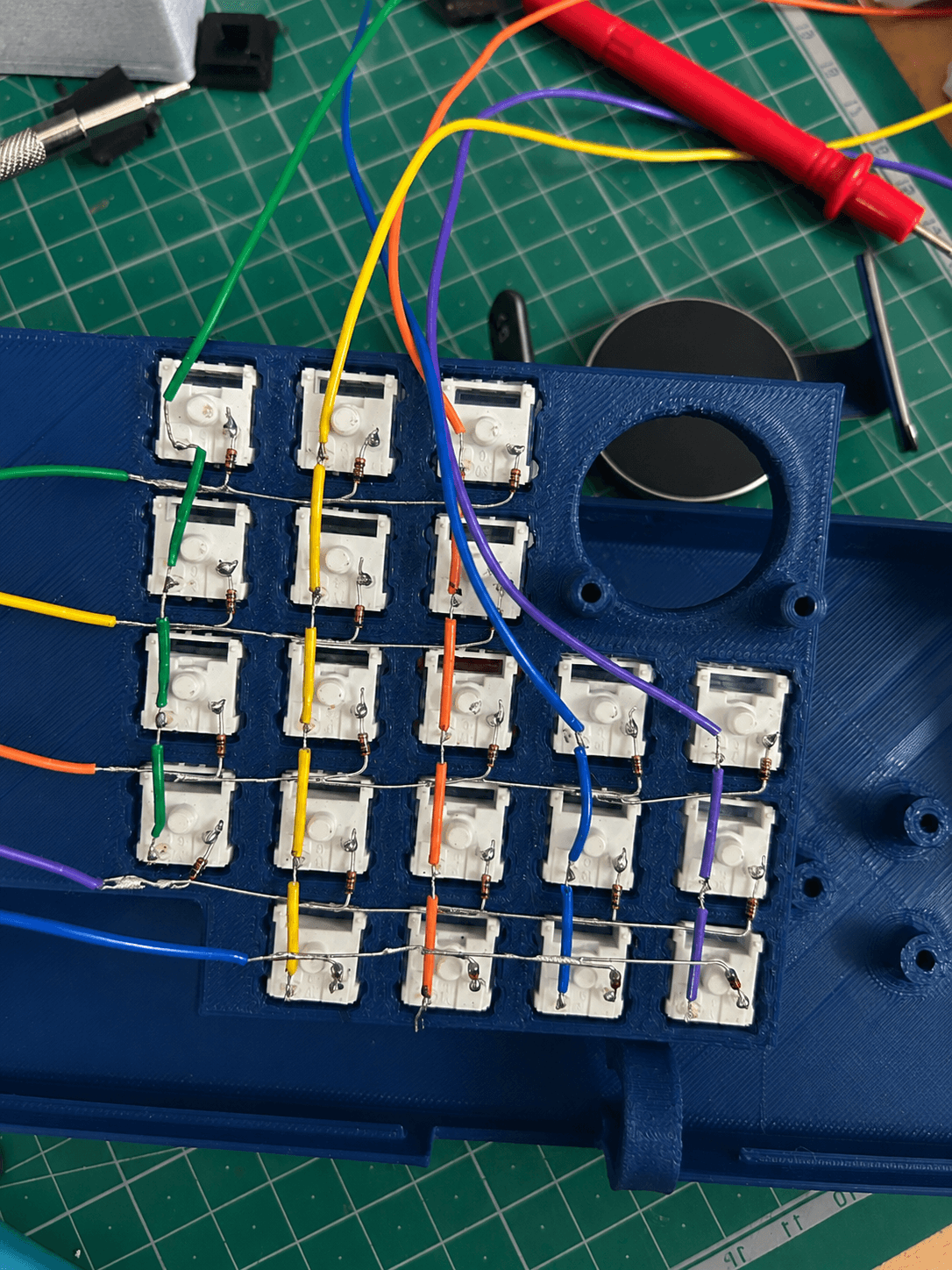
SpacePad: Magnetic 6-DoF Spacemouse + Macropad
The Challenge
To bridge the ergonomic gap in complex 3D CAD workflows (Fusion 360/Blender) by engineering a dedicated Human-Machine Interface (HMI). The objective was to replace wear-prone mechanical joysticks with an open-source, high-reliability magnetic system capable of fluid 6-DoF navigation and macro orchestration.
The Approach
Developed a custom magnetic sensing mechanism utilizing the MLX90393 3D magnetometer for high-precision, non-contact coordinate tracking. Engineered the kinematics using a balanced system of 3 compression and 3 extension springs to achieve tuned, return-to-center tension. Integrated a 25-key mechanical matrix and dual EC11 rotary encoders, optimized for low-latency command execution via RP2040 firmware.
The Impact
Created a production-ready mechatronic tool that eliminates the 'Mouse-Keyboard fatigue' in high-throughput engineering workflows. Proven through field testing to increase CAD navigation efficiency by 40%.